在考研中体系的几何组成分析是各大高校的必考题,占3-5分,本章需要熟练掌握体系几何组成分析基本方法,能快速判断静定结构的组成顺序,为静定结构内力计算奠定基础。对于超静定结构,能够迅速确定多余约束的个数,通过减除适当的约束(不能增加原来没有的约束或解除必要约束)使超静定结构变为静定结构,为力法以及超静定内力的计算奠定基础。
本专栏的目的是帮助大家:(1)深刻理解所涉及的基本概念(2)熟练掌握无多余约束的几何不变体系组成的三角形规则(3)二元体规律:加减二元体不改变可变性(4)熟练掌握体系等效的三种方法,化繁为简(5)了解不满足三角形规则时分析体系可变性的零载法(6)重难点掌握瞬变体系的判定以及与常变体系的区别(7)掌握几何组成分析的技巧和重要方法步骤。
(1)深刻理解所涉及的基本概念
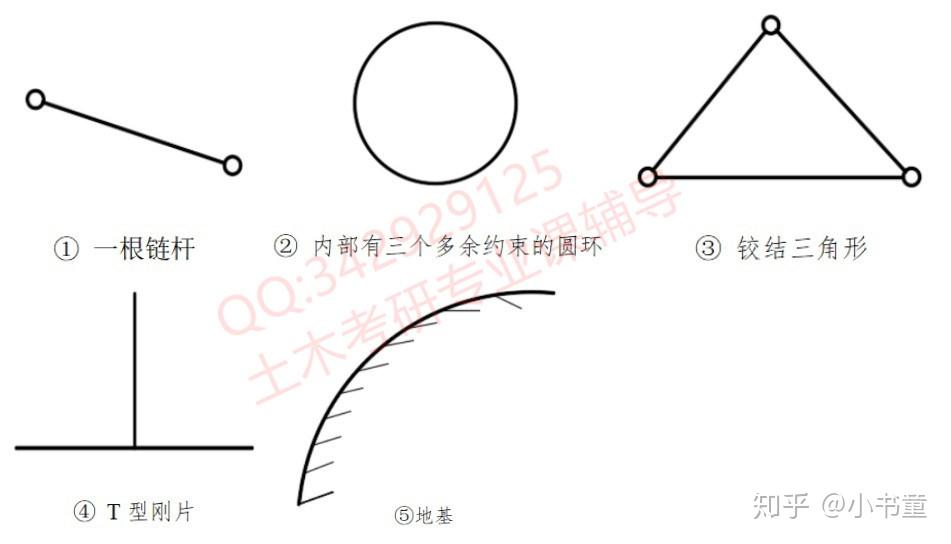
(一)刚片:平面体系中,不考虑材料变形的几何不变部分(内部可有多余约束)称为刚片平面内的刚体称为刚片,如一根梁,铰接三角形,以及地基都是刚片。如下图所示。考研中经常会出现不知道如何选取刚片的情况,要极其注意。
(二)自由度:自由度是物体或体系运动时可以独立变化的几何参数的数目,即完全确定物体或体系位置所需的独立坐标的数目,例如,平面上一个点有2个自由度(x,y),平面上有一个刚片有三个自由度(x,y,ψ),判断一个体系是否为几何可变,实际上就是判别该体系是否存在刚体运动的自由度。
(三)约束:能减少体系自由度的装置(也称为联系)。在杆件体系中,各杆件之间,体系与基础之间都需通过结点,支座联系起来,这些结点支座均为约束。具体约束类型分为两种类型,一种是刚片与基础之间的约束,另一种类型是刚片与刚片 之间的约束。
第一大类:结构与基础之间的约束——支座
支座:把结构与基础联结起来的装置,支座反力是指支座对结构的反作用力,根据平面结构的支座构造和约束特点不同,可简化为六种。
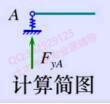
滚轴支座(链杆或活动铰支座。可动铰支座)特点:一是杆端A产生垂直于链杆方向的线位移,二是杆端A产生沿链杆方向的支座反力。

②固定铰支座:能限制结构沿两个方向的运动,结构不能移动只能转动,故只能产生两个反力,相当于两个约束。特点:杆端截面A无线位移,但可以自由转动,二是有水平支座反力和竖向支座反力。

③固定支座:这类支座不容许结构发生任何的移动或者转动,产生三个反力(H.V.M)相当于三个约束。特点是:杆端截面A不产生线位移和角位移,二是杆端截面A有支反力矩、水平支座反力和竖向支座反力。

④滑动支座(定向支座)特点:一是杆端A无转角和沿链杆方向的线位移,可以产生垂直于链杆方向的线位移,二是杆端A有支座反力矩,和沿链杆方向的支座反力。

⑤伸缩弹性支座:这类支座在承受(拉力或者压力)荷载的同时,它本身将产生一定的(拉伸或压缩)弹性变形,且支座的反力与其位移是相关的,用具有一定刚度的线性弹簧来表示伸缩弹性支座。特点:一是不限制转动和水平移动,竖向可以有一定的弹性变形,二是只有竖向支座反力。
⑥旋转弹性支座:这类支座在承受力矩荷载的同时,本身将产生一定的转角弹性变形。特点:一是杆端A无水平位移和竖向位移,可有一定转角弹性变形。二是杆端A有水平支反力矩,竖向支反力,水平支反力。

第二大类:刚片和刚片之间的约束
刚片和刚片之间的约束分为两种,一种是链杆约束,一种是结点约束,按各种连接的约束效用及其力学特性,平面杆件机构的结点一般可划分为五种,铰结点,刚结点,混合结点,定向结点以及旋转弹性结点,下面详细介绍。
第一种:链杆约束
链杆和等效链杆(相当于一个约束):链杆为两端有铰的刚性直杆或曲杆,一根链杆或链杆支座相当于一个约束,只以两个铰与外界相连的刚片称为等效链杆,等效链杆的作用与链杆相同,举例如下,如图所示用虚线表示的链杆。

第二种:结点约束
①铰结点:各杆连接起来,可以自由转动而不产生摩擦阻力的连接点,称为铰结点,可分为单铰和复铰,单铰是指联结两个刚片的铰,一个单铰相当于两个约束。复铰是指联结两个以上刚片的铰,联结n个刚片的复铰相当于(n-1)个单铰,相当于2(n-1)个约束,特点有两个:一是被连接的杆件只能相对转动,而不能相对平移,二是既不能承受也不能传递力矩,铰处弯矩为零。需注意的是虚铰,虚铰也叫做瞬铰,它是连接两个刚片的两链杆延长线的交点,与单铰具有相同的约束作用,下面会详细讲到。

虚铰(瞬铰):与实铰相区别,两链杆不是真实的汇交于一点,而是联结两个刚片的两根链杆的作用相当于在其交点处的一个单铰,不过这个铰的位置是随着链杆的转动而改变的,两根平行链杆所起的约束作用相当于无穷远处的瞬铰。
注意:两根杆只有联结两个相同的刚片,才能看作是瞬铰。

特殊情况:
无穷远处的瞬铰:当组成瞬铰的两链杆互相平行的时候,即组成无穷远处的瞬铰。此时不能用一般几何学来分析,如图,这时需要用射影几何学的定理:
㈠每个方向都有且有一个无穷远点(即该方向各平行线的交点);不同的方向具有不同的无穷远点。
㈡平面上不同方向所有无穷远点都在一条直线上,即无穷远直线。
㈢有限点均不在无穷远直线上。
②刚结点:各杆连接起来相互之间不可能发生任何相对的移动或转动的结点,称为刚结点,分为单刚结点和复刚结点,单刚是指联结两个刚片的刚结点,相当于三个约束。复刚结点指联结两个以上刚片的刚结点,联结n个刚片的刚结点相当3(n-1)个约束。特点:一是被连接的杆件无相对转动和平移,变形后杆件之间的夹角不变,二是可以承受和传递力和力矩。
③复合结点(混合结点或不完全铰结点):如果在同一个结点上同时出现上述两种连接方式时,则称这种结点为混合结点或不完全铰结点,刚结点处的两个杆件之间是刚结在一起的,上面两个杆件作为一个整体同下面的杆件铰接在一起。如下图所示:

④定向结点:包括剪移定向结点和轴移定向结点,其中剪移定向结点是允许剪切平移的定向结点,轴移定向结点是指允许轴向平移的定向结点。特点:一是被连接的杆件间无相对转动但可以相对平移,且变形后杆件之间的夹角不变,二是可以承受和传递力矩。

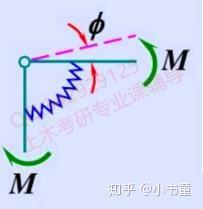
⑤旋转弹性结点:在杆端弯矩的作用下,各杆之间可能产生相对转角弹性变形的结点,称为旋转弹性结点,性质介于铰结点和刚结点之间,特点:一是杆件之间只能有限相对转动,不能相对平移,二是可以承受和传递力和力矩。如图所示为具有两根杆件的旋转弹性结点,在杆端力矩M的作用下,两杆之间产生相对转角弹性变形Φ,在计算中,通常用M和Φ的比值,表示结点的旋转刚性,称为结点刚性旋转常数或结点旋转刚性系数。