2、表面法
表面法将整个数据模型看作一个大的复杂空间曲面,来显示地物表面形状。
具体实现时将表面分成很多格网,以此为面元,作为基本单元进行处理。面元具有各自的属性可独立进行填充消隐显示。
3、体素法
体素法具有真正意义上的三维显示,它将空间物体分成很多的体元素,如长方体、台面体,作为基本单元进行处理。体元具有真三维特性。
5、数字地形分析
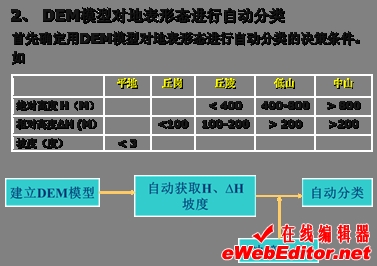
 一、基于高程的基本运算
一、基于高程的基本运算
(1)高程分级:等间距或不等间距划分为若干高程等级,如用来区分丘陵、低山、中山、高山等。
(2)平均高程:设某区域具有等间距的n个规则格网,每个格网的高程为h,就可计算区域平均高程。
二、坡度与坡向计算
1)坡度的定义
地面的坡度是表示地表面上该点倾斜的程度。从数学说,地面的坡度是一个矢量,它既有大小,又有方向,坡度定义为地形表面和水平面之间夹角的正切值。用矢量来描述坡度时,坡度是地面的法向量与Z轴之夹角slope 。
2)坡度的计算
(1)空间矢量法计算坡度:格网模型中地表基本单元的坡度等于其法矢量与Z轴之夹角slope。从矢量代数知,两矢量的夹角余弦等于两矢量的数量积与模的乘积之商。因此,当知道了格网的法矢量就可计算出它同Z轴之夹角。
(2)拟合平面法计算坡度:

3)坡向的定义
地面的坡向就是坡面的朝向,粗略的可分为向南、向北、向东、向西。更细的还可进一步分为南、北、东、西、东南、西南、东南和西北向。
DEM模型中坡向定义为地形表面法线在水平面上的投影与X轴之间夹角。在地学领域中,通常根据法线在水平面上的投影的位置,将其分成阳坡、阴坡、半阳坡、和半阴坡。
4)格网面元坡向的计算
地表基本单元的坡向是其法矢量在平面上的投影与正北方向的夹角,该夹角在0-90°之间。
三、地面形态的计算
根据相邻网格点上的坡度和坡向之间的逻辑关系,可以判断坡形的凹凸变化情况,确定沟谷线、山脊和鞍部的位置,划分流域范围。
影响坡度坡向计算的因子:
第一个影响因子是用于生成坡度和坡向的DEM数据的分辨率,或许也是最重要的影响因子。研究还表明,随着DEM模型分辨率的减小,坡度和坡向测算的准确度随之降低。
第二个影响坡度和坡向测算的因子是DEM数据的质量。我们可在个人计算机上从卫星影像中提取DEM数据。但是,提取的DEM数据的质量依赖于所用的软件包和输入数据(包括地面控制点)的质量。质量不同的DEM数据对坡度和坡向测算的精度影响不同。
第三个影响因子是坡度和坡向算法。算法不同测算的坡度和坡向精度也不相同。
最后,局部地形也会影响坡度和坡向的测算。在陡坡地区,坡度估算的误差较大;地形起伏小的平坦地区,坡向估算的误差较大。
1、山谷点、山脊点的计算
谷点和脊点是地面形态的重要特征,在地面分析中具有重要意义。从概念上讲,谷点是地势的最低点,地势的相对最低点的集合为谷;脊点是地势的最高点,地势的相对最高点的集合为脊。
2、沟谷密度
沟谷密度是表征地面破碎程度的一种指标,它是沟谷总长度(∑L)与地表单元总面积(∑A)之比。提取谷点和脊点,将地表单元内所有谷点在单元区域内的延伸长度累加,便获得单元的沟谷长度。
3、地表粗糙度
反映某一面积单元内地势起伏变化与侵蚀程度的复杂程度,是地表面积与投影面积之比。
4、地表辐照度
计算辐照度需考虑日照条件(太阳赤纬、高度角、时角及大气状况)与坡面几何条件的相互关系由下式决定:
 |
其中:
β大气透过率,与太阳高度和大气状况有关;
Sc为太阳常数;
Sa为太阳高度角可由球面三角公式求出;
t是时角;
a、b为坡面方程系数;
θ为坡度。
四、特征的提取
1、地形特征的提取
地形特征包括地形特征点、地形特征线、地形特征面。
地形特征点:山峰点、谷低点、鞍部点
地形特征线:山谷线、山瘠线、
地形特征面:凹凸面
2、水系特征的提取
水系特征如分水岭、汇水流域
五、DEM模型的可视化分析
可视性分析也称通视分析,被广泛地应用在军事上、森林火灾监测点的设置,无线发射塔如微波站、广播电台、电视塔的设置等方面。
1、剖面分析
地形的剖面分析可用来表示区域的地貌形态、地势变化、地质构造等等。地形的剖面分析中常画剖面图,画剖面图的关键是求剖面线。
首先通过直线AB向地平面作一垂直于XOY的面S,而后再求S面同地形模型面交线,即剖面线,最后用剖面线来表示剖面(图一)
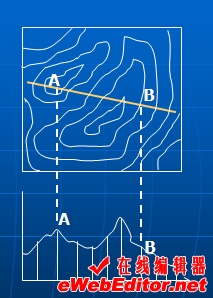
图一 图二
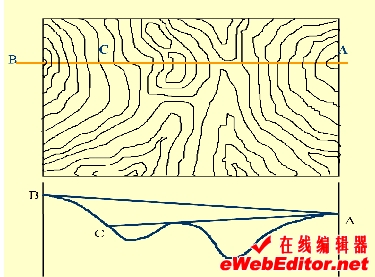
2、通视性分析
A点和B点之间的通视性,指在A点是否能看到B点。
剖面线分析法
在观察点A和目标点B之间画线,并作于XY平面的垂直面S,求出地形模型面与S面的交线判别AB直线与剖面线是否相交,如不相交, AB两点之间可视;如相交, AB两点之间不可视。(图二)
3、可视域分析
可视域指某观察点可视的区域范围。可视域分析的应用极为广泛。
1)基于格网数据结构的可视域分析
可视域分析中用得最多的是用格网数据结构,即用“可视矩阵”,表示可视的区域范围,并显示之。
2)基于TIN的可视域分析,
这种方法是基于TIN地面模型中三角形面元的可视部分来表示,其方法是用TIN地面模型的可视域计算和三维场景中隐藏面消除法解决。
可视域分析可实现可视域查询,以查询所在观察点可视的区域范围,得到可视域范围图。
6、4D数据
数字高程模型:是在某一投影平面(如高斯投影平面)上规则格网点的平面坐标(X,Y)及高程(Z)的数据集。DEM的格网间隔应与其高程精度相适配,并形成有规则的格网系列。根据不同的高程精度,可分为不同类型。为完整反映地表形态,还可增加离散高程点数据。
数字线划地图:是现有地形图要素的矢量数据集,保存各要素间的空间关系和相关的属性信息,全面地描述地表目标。
数字栅格地图:是现有纸质地形图经计算机处理后得到的栅格数据文件。每一幅地形图在扫描数字化后,经几何纠正,并进行内容更新和数据压缩处理,彩色地形图还应经色彩校正,使每幅图像的色彩基本一致。数字栅格地图在内容上、几何精度和色彩上与国家基本比例尺地形图保持一致。
数字正射影像图:是利用数字高程模型(DEM)对经扫描处理的数字化航空像片,经逐像元进行投影差改正、镶嵌,按国家基本比例尺地形图图幅范围剪裁生成的数字正射影像数据集。它是同时具有地图几何精度和影像特征的图像,具有精度高、信息丰富、直观真实等优点。
7、不规则三角网的生成
1、Delaunay三角形产生的基本准则:
1)外接圆准则:任何一个Delaunay三角形的外接圆的内部不能包含其它任何点
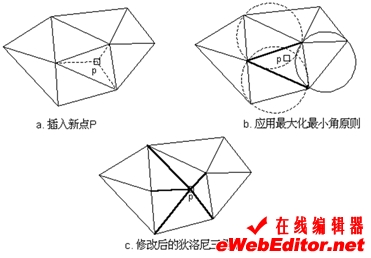
2) 最大化最小角原则:每两个相邻的三角形构成的凸四边形的对角线,在相互交换后,六个内角的最小角不再增大。
3)局部优化准则:Lawson [1977]又提出了一个局部优化过程LOP(Local Optimization Procedure)方法。如图所示。先求出包含新插入点p的外接圆的三角形,这种三角形称为影响三角形(Influence Triangulation)。删除影响三角形的公共边(图b中粗线),将p与全部影响三角形的顶点连接,完成p点在原Delaunay三角形中的插入。
2、Delaunay算法的三种类型
1)逐步生成法
(1)以任一点为起始点;(2)找出离起始点最近的数据点连线,作为起始基线;(3)按联三角形法则找出第三点连成三角形;(4)再以连成三角形的新边作基线重复上述步骤,直到终止。
2)分割归并法
基本思想:将复杂问题简单化,也就是说首先将数据点分割成易于进行三角化的子集,如一个子集中包括三个、四个点,然后对每个子集进行三角剖分,并用LOP算法保证三角剖分为DT三角网。当每个子集剖分完成后,对每个子集的三角剖分进行合并,形成最终的整体三角网。不同的实现方法可有不同的点集划分方法、 子三角网生成方法及合并方法等
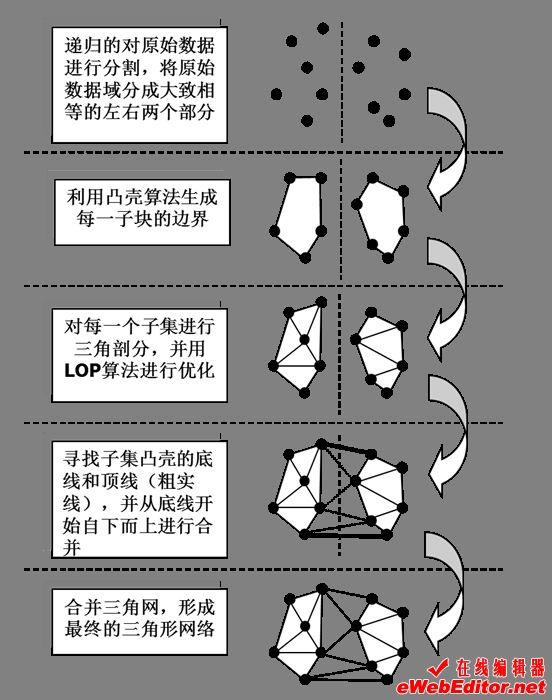
分割合并算法的基本步骤为:
第一步:把数据集以横座标为主、纵坐标为辅按升序进行排序;
第二步:如果数据集中的数据个数大于给定的阈值,把数据域划分为个数近似相等的左右两个子集,对每一子集做如下的工作
(1)计算每一个子集的凸壳
(2)以凸壳为数据边界,对每一数据子集进行三角剖分,并用LOP进行优化,使之成为DT三角剖分
(3)找出连接左右子集两个凸壳的底线和顶线
(4)由底线到顶线,合并两个子三角网
第三步:如果数据集中的数据个数小于给定的阈值,则直接输出三角剖分结果;
3)逐点插入法
逐点插入算法的过程非常简单,基本步骤为:
第一步:定义包含所有数据点的初始包容盒,并对该包容盒进行初始三角剖分;
第二步:对所有数据点进行循环,作如下工作(设当前处理的数据点为P):
1、在已存在的三角网中,查找包含P的三角形T;
2、P与T的三个顶点相连,形成T的三个初始三角剖分;
3、用LOP算法对初始三角剖分进行优化处理;
第三步:处理外围三角形。
8、DEM模型的应用
一、DEM模型主要用途:
1)在国家数据库中存储数字地形图的高程数据,作为绘制等高线、地面晕渲图、立体图、剖面图依据。
2)提取地面因子,获取地形因子数据。
3)进行地形分析,为各行各业服务,如道路规划、地貌分析、坝址选择等。
4)作为景观分析和模拟的基础,用于军事、景观规划等领域。
二、DEM应用实例